 优傲学院1.1 机器人开箱和安装
优傲学院1.1 机器人开箱和安装
- 优傲学院1.1 机器人开箱和安
- 拓德科技播放2672次
 优傲学院1.2 机器人的结构和技术参数
优傲学院1.2 机器人的结构和技术参数
- 优傲学院1.2 机器人的结构和技
- 拓德科技播放2483次
 优傲学院1.3 机器人启动
优傲学院1.3 机器人启动
- 优傲学院1.3 机器人启动
- 拓德科技播放2454次
 优傲学院2.1 设置机器人窗口
优傲学院2.1 设置机器人窗口
- 优傲学院2.1 设置机器人窗口
- 拓德科技播放2455次
 优傲学院2.2 为机器人编程窗口-1
优傲学院2.2 为机器人编程窗口-1
- 优傲学院2.2 为机器人编程窗
- 拓德科技播放2428次
 优傲学院2.3 为机器人编程窗口-2
优傲学院2.3 为机器人编程窗口-2
- 优傲学院2.3 为机器人编程窗口
- 拓德科技播放2405次
 优傲学院3.1 TCP概念,定义和使用-1
优傲学院3.1 TCP概念,定义和使用-1
- 优傲学院3.1 TCP概念,定义和
- 拓德科技播放2460次
 优傲学院3.2 TCP概念,定义和使用-2
优傲学院3.2 TCP概念,定义和使用-2
- 优傲学院3.2 TCP概念,定义和
- 拓德科技播放2398次
 优傲学院3.3 运动指令和参数-1
优傲学院3.3 运动指令和参数-1
- 优傲学院3.3 运动指令和参数
- 拓德科技播放2371次
 优傲学院3.4 运动指令和参数-2
优傲学院3.4 运动指令和参数-2
- 优傲学院3.4 运动指令和参数-
- 拓德科技播放2383次
 优傲学院3.5 基本指令和参数
优傲学院3.5 基本指令和参数
- 优傲学院3.5 基本指令和参数
- 拓德科技播放2375次
 优傲学院3.6 高级指令和参数-1
优傲学院3.6 高级指令和参数-1
- 优傲学院3.6 高级指令和参数-
- 拓德科技播放2383次
 MiR学院 - Getting started with the MiR100
MiR学院 - Getting started with the MiR100
- MiR学院 - Getting started w
- 拓德科技播放2464次
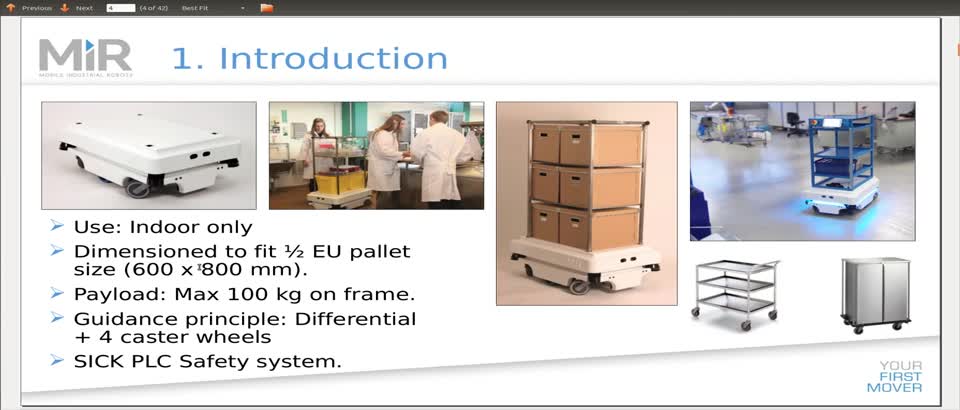 MiR学院 - Chapter 1 Introduction
MiR学院 - Chapter 1 Introduction
- MiR学院 - Chapter 1 Introdu
- 拓德科技播放2421次
 MiR学院 - Chapter 2 Sensors
MiR学院 - Chapter 2 Sensors
- MiR学院 - Chapter 2 Sensors
- 拓德科技播放2467次
 MiR学院 - Chapter 4 Mechanic and electrical components
MiR学院 - Chapter 4 Mechanic and electrical components
- MiR学院 - Chapter 4 Mechani
- 拓德科技播放2451次
 MiR学院 - Chapter 5 Planner
MiR学院 - Chapter 5 Planner
- MiR学院 - Chapter 5 Planner
- 拓德科技播放2395次
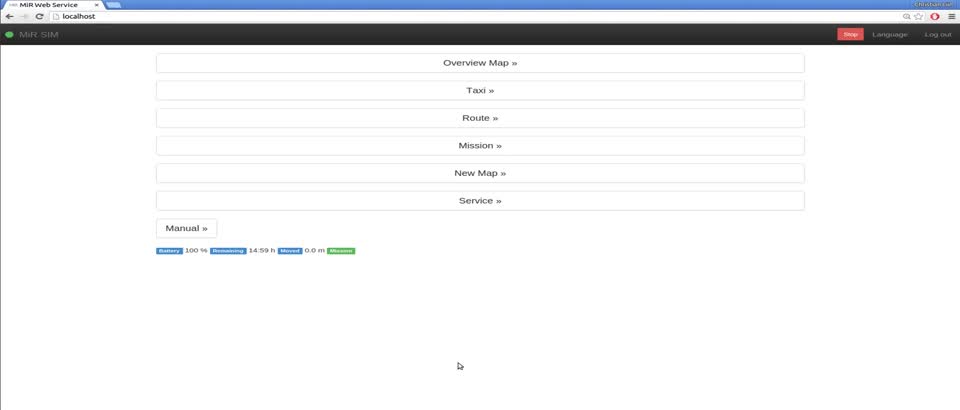
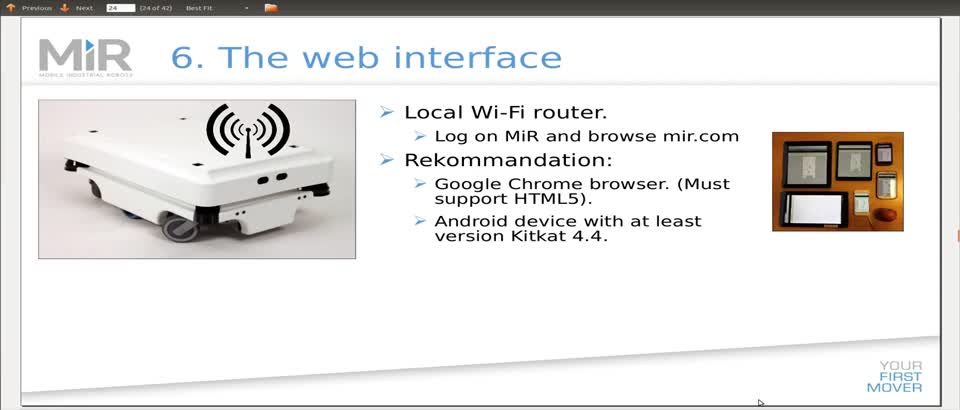 MiR学院 - Chapter 6 The web interface part 1 Manual mode
MiR学院 - Chapter 6 The web interface part 1 Manual mode
- MiR学院 - Chapter 6 The web
- 拓德科技播放2426次
 MiR学院 - Chapter 6 The web interface part 2 Creating map
MiR学院 - Chapter 6 The web interface part 2 Creating map
- MiR学院 - Chapter 6 The web
- 拓德科技播放2431次
 MiR学院 - Chapter 6 The web interface part 3 Edit the map
MiR学院 - Chapter 6 The web interface part 3 Edit the map
- MiR学院 - Chapter 6 The web
- 拓德科技播放2390次
 MiR学院 - Chapter 6 The web interface part 4 Creating positions
MiR学院 - Chapter 6 The web interface part 4 Creating positions
- MiR学院 - Chapter 6 The web
- 拓德科技播放2402次
 MiR学院 - MiR学院 - Chapter 6 The web interface part 4 Creating positions
MiR学院 - MiR学院 - Chapter 6 The web interface part 4 Creating positions
- MiR学院 - MiR学院 - Chapter
- 拓德科技播放2389次
 MiR学院 - Chapter 6 The web interface part 6 Route function
MiR学院 - Chapter 6 The web interface part 6 Route function
- MiR学院 - Chapter 6 The web
- 拓德科技播放2383次
 MiR学院 - Chapter 6 The web interface part 6 Route function
MiR学院 - Chapter 6 The web interface part 6 Route function
- MiR学院 - Chapter 6 The web
- 拓德科技播放2394次
 nGripper90_CB4.0 开箱安装使用视频
nGripper90_CB4.0 开箱安装使用视频
- nGripper90_CB4.0 开箱安装使
- 拓德科技播放3071次
 NONEAD Shelf Carrier System CB4 Installion MiR100&MiR200
NONEAD Shelf Carrier System CB4 Installion MiR100&MiR200
- NONEAD Shelf Carrier System
- 拓德科技播放2362次
 NONEAD Shelf Carrier System CB4 Installion MiR250
NONEAD Shelf Carrier System CB4 Installion MiR250
- NONEAD Shelf Carrier System
- 拓德科技播放2364次
 NONEAD Shelf Carrier System CB4 Maintenance MiR100&MiR200&MiR250
NONEAD Shelf Carrier System CB4 Maintenance MiR100&MiR200&MiR250
- NONEAD Shelf Carrier System
- 拓德科技播放2331次
 NONEAD Shelf Carrier System CB4 Shelf placement requirement MiR100&MiR200&MiR250
NONEAD Shelf Carrier System CB4 Shelf placement requirement MiR100&MiR200&MiR250
- NONEAD Shelf Carrier System
- 拓德科技播放2385次
 NONEAD Shelf Carrier System CB4 Upgrade top signal&power module MiR100&MiR200&MiR250
NONEAD Shelf Carrier System CB4 Upgrade top signal&power module MiR100&MiR200&MiR250
- NONEAD Shelf Carrier System
- 拓德科技播放2436次
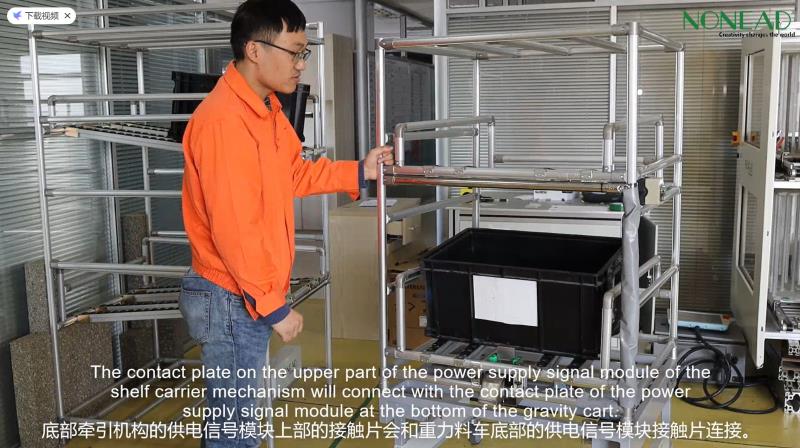 NONEAD Shelf Carrier System CB4 Introduction of gravity carrier& gravity rack MiR100&MiR200&MiR250
NONEAD Shelf Carrier System CB4 Introduction of gravity carrier& gravity rack MiR100&MiR200&MiR250
- NONEAD Shelf Carrier System
- 拓德科技播放2408次
 NONEAD Shelf Carrier System CB4 Troubleshooting of Power on MiR250
NONEAD Shelf Carrier System CB4 Troubleshooting of Power on MiR250
- NONEAD Shelf Carrier System
- 拓德科技播放2400次
 NONEAD Shelf Carrier System CB4 Troubleshooting of Pickup Shelf MiR100&MiR200
NONEAD Shelf Carrier System CB4 Troubleshooting of Pickup Shelf MiR100&MiR200
- NONEAD Shelf Carrier System
- 拓德科技播放2420次
 NONEAD Shelf Carrier System CB4 Troubleshooting of Pickup Shelf MiR100&MiR200&MiR250
NONEAD Shelf Carrier System CB4 Troubleshooting of Pickup Shelf MiR100&MiR200&MiR250
- NONEAD Shelf Carrier System
- 拓德科技播放2430次
 拓德工业协作复合机器人快速部署培训
拓德工业协作复合机器人快速部署培训
- 拓德工业协作复合机器人快速部
- 拓德科技播放2118次
 01.nGripper90_CB4.0开箱视频_NEW
01.nGripper90_CB4.0开箱视频_NEW
- 01.nGripper90_CB4.0开箱视频
- 拓德科技播放2069次
